Road safety is one of the leading causes of injury and death globally. This project addresses it by building a complete Advanced Driver Assistance System (ADAS) that monitors both the road and the driver simultaneously — alerting in real-time and even taking corrective action when needed.
Six integrated safety components
Two points of view
The system operates with two independent camera perspectives running concurrently:
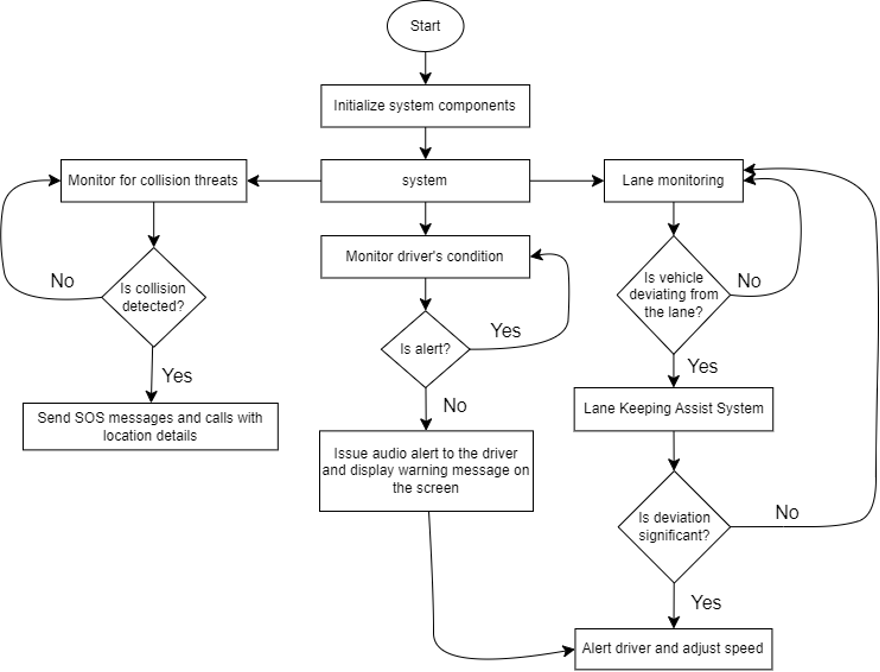
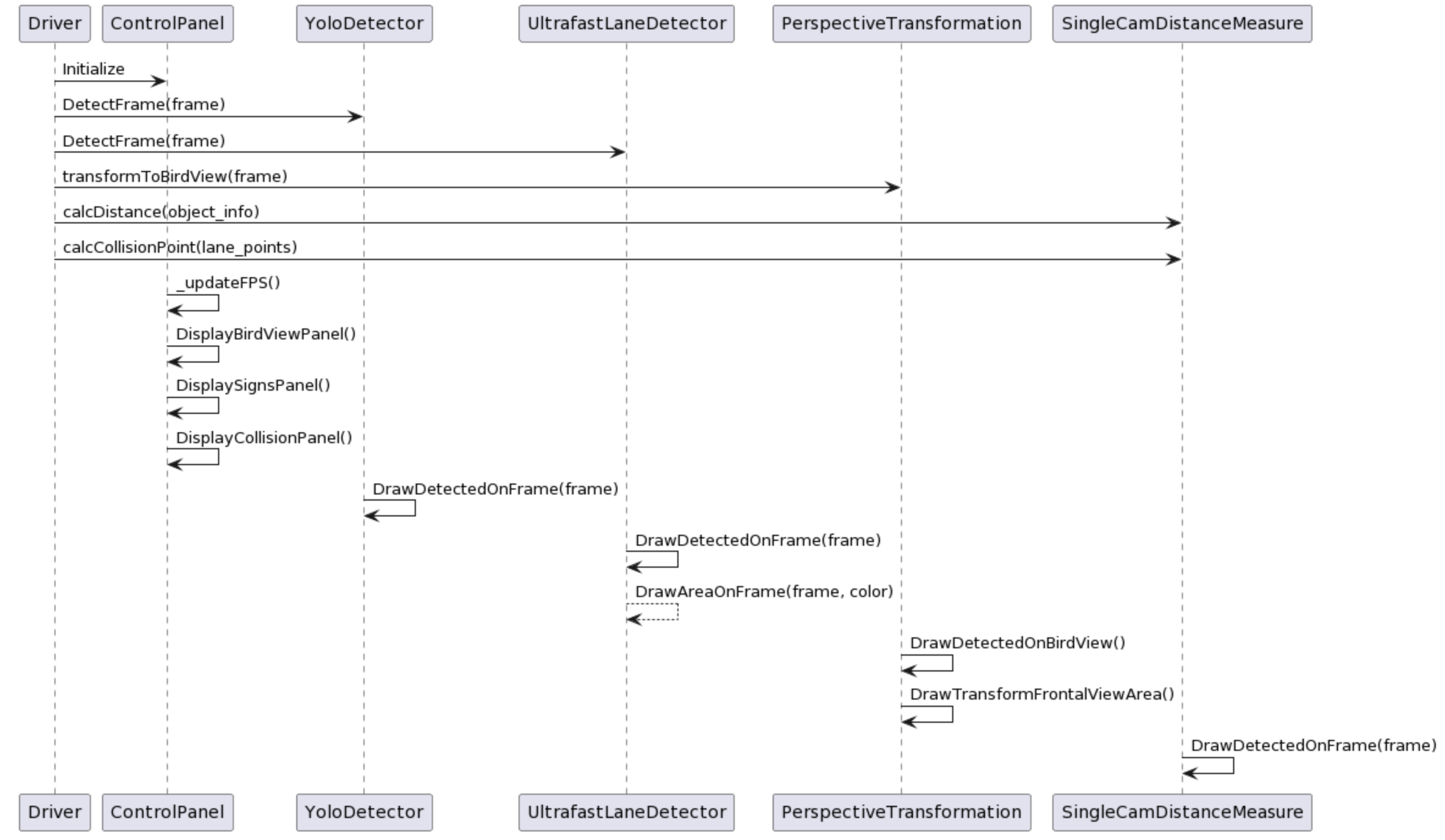
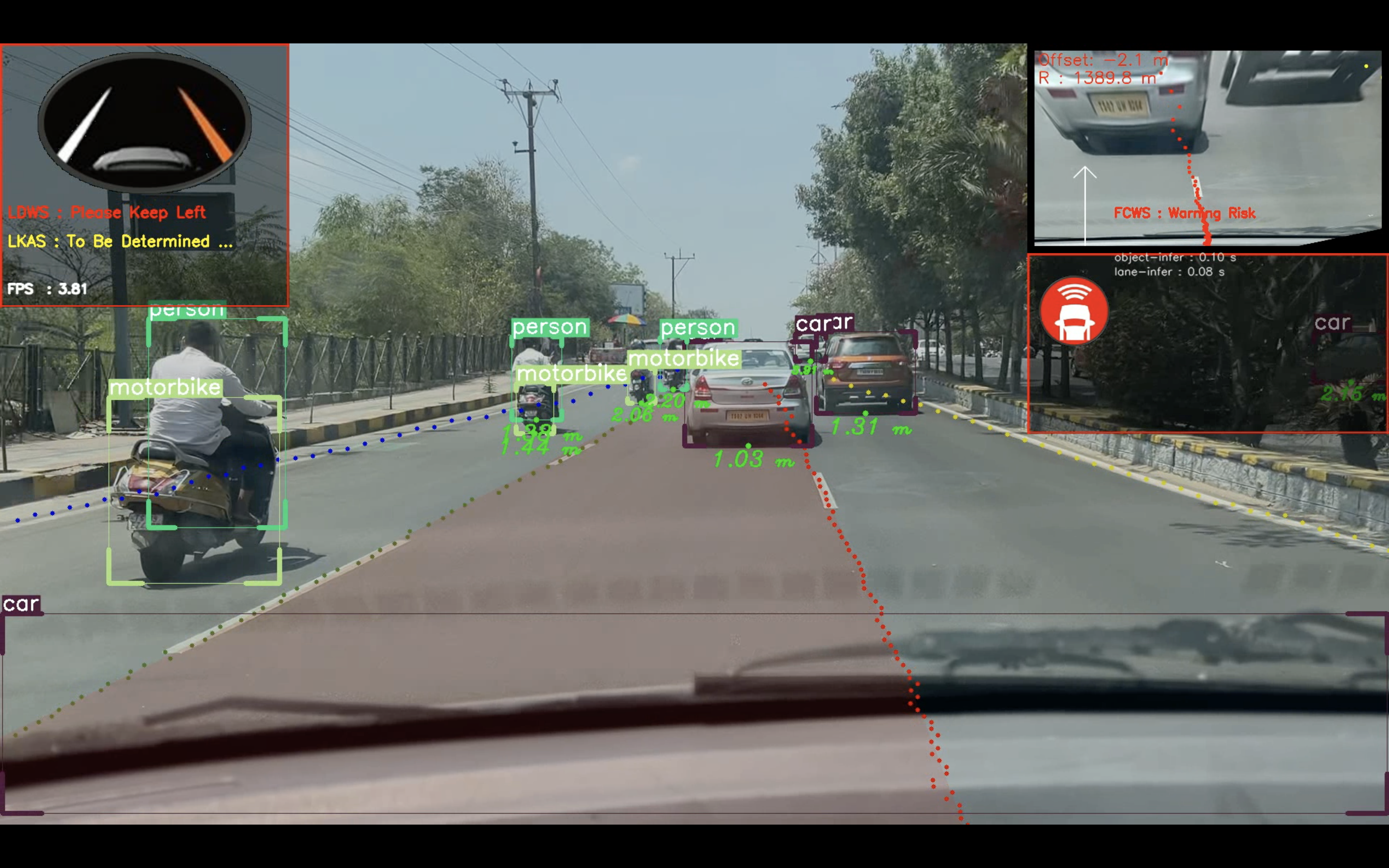
POV 1 — Monitoring the external environment
Handles lane tracking, object detection, and collision warning. Three UML diagrams define the class relationships, collaboration, and use-case flows.

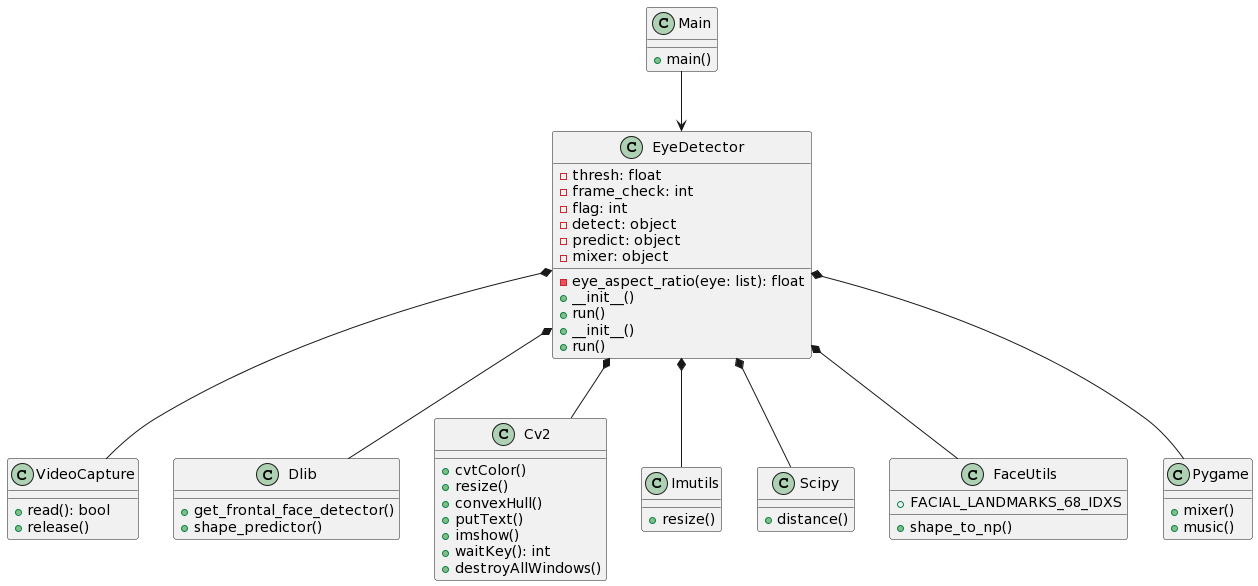
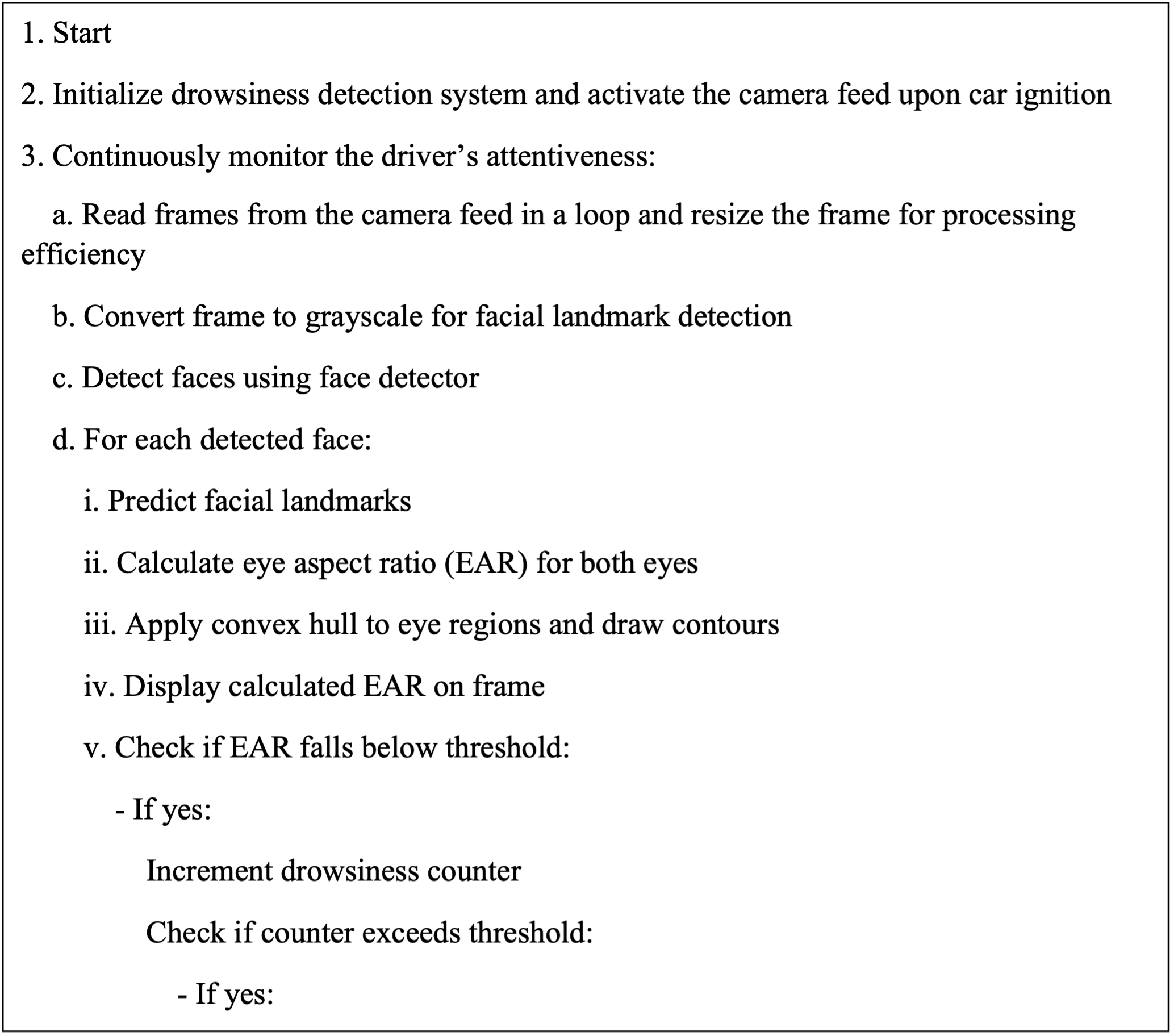
POV 2 — Monitoring the internal environment
Handles drowsiness detection using Eye Aspect Ratio (EAR). If EAR drops below a threshold for a sustained period, the system triggers an alert.
System in action




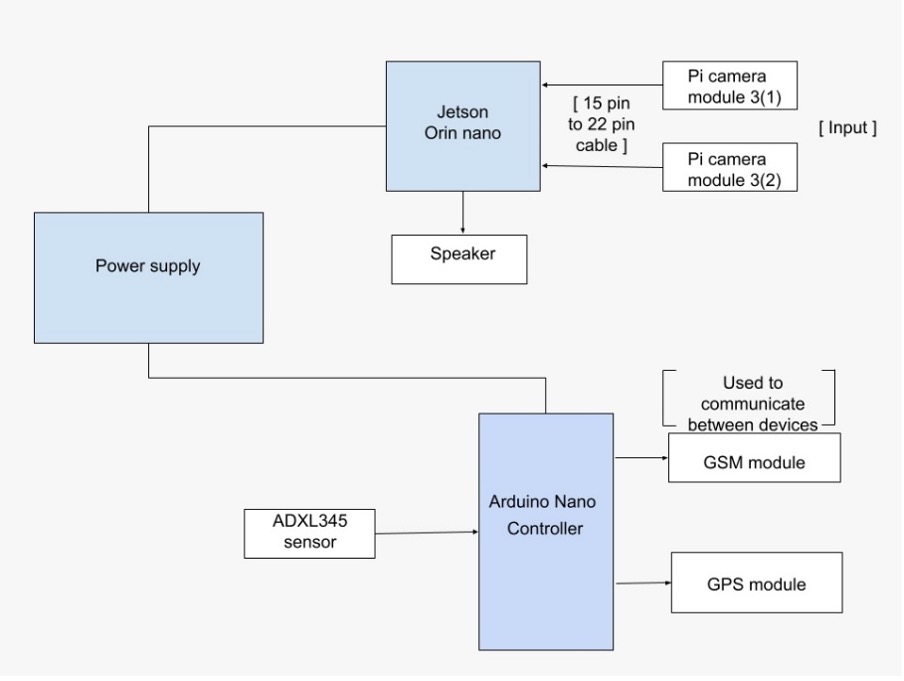
Jetson-powered edge deployment
Running the project
# Install dependencies
pip install -r requirements.txt
# Run POV_1 — external environment monitoring
python demo.py
# Run POV_2 — drowsiness detection (from Drowsiness detector dir)
python detect.pyYOLO model conversion
# Convert ONNX model to TensorRT for edge deployment
python convertOnnxToTensorRT.py -i <onnx-model> -o <trt-model>
# Quantize to float16 to reduce model size
python onnxQuantization.py -i <onnx-model>This project demonstrates that a comprehensive ADAS suite — normally found in premium vehicles — can be built and deployed on affordable edge hardware like the Jetson Orin Nano. The dual-POV architecture means the system simultaneously watches the road and the driver, providing layered protection that neither a human nor a single-camera system can match alone.